

眼看要过年了,回老家之后,养的小鱼用不了几天就要见马克思,想着用朋友送的zero来做一个远程喂鱼的小东西,应该不难。
思路:利用双路继电器分别控制灯和水泵,使用mjpg-streamer来获取摄像头的视频流,并在特定的时刻自动开闭继电器。
网络环境:有公网IP的家庭网络,利用路由器的ddns或者花生壳,树莓派作为tcpserver对外提供访问。但这个条件,目前已经很难满足了,一般网络都是大内网,这种情况可以让树莓派作为tcpclient主动请求服务器获取指令,本文介绍的是第一种情况。
鱼食槽暂时未完成,准备搞两个大一点的瓶盖,合起来热熔胶伺候,中间放鱼食,边缘开两个孔,最终固定到步进电机上,转一圈就能完成喂鱼动作。
树莓派的安装和配置,本文不再赘述,本文分“硬件部分”、“软件部分”、“自启动配置”来说明整个项目。
硬件部分
本项目中使用的硬件:
必不可少的大脑:
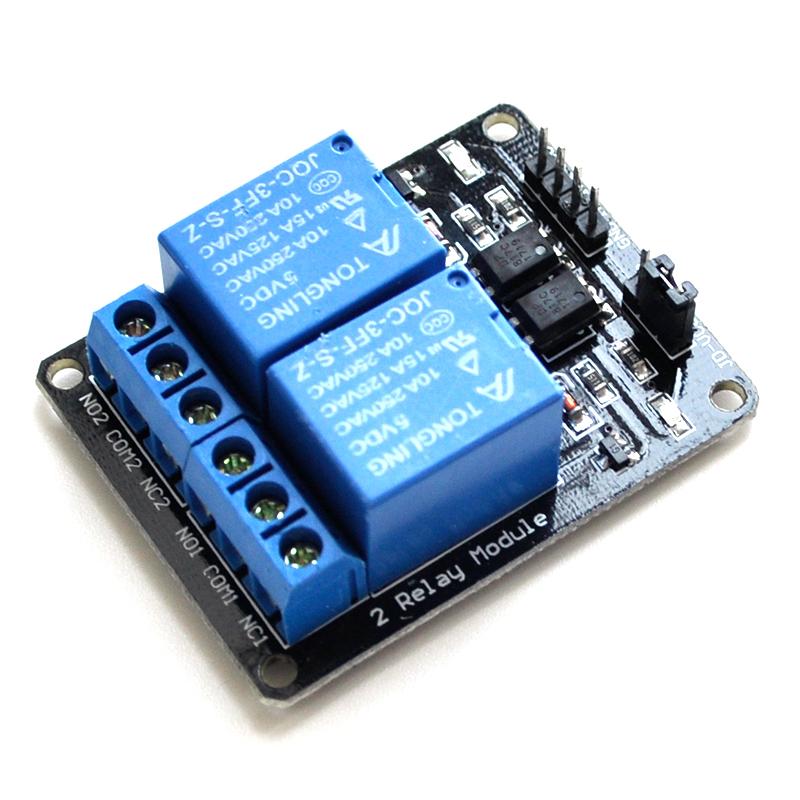
1. 双路继电器
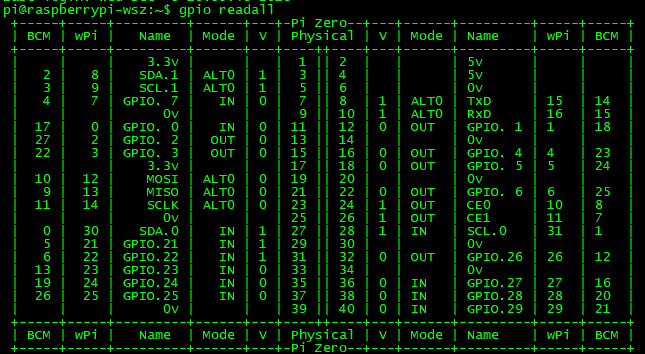
使用 gpio readall 指令来获取树莓派上的所有接口信息。
这里使用BCM方式来控制GPIO接口,选择BCM编号为18和27的插针,也就是GPIO1和GPIO2,作为两路继电器的信号控制,继电器的vcc和gnd,分别接到树莓派的5V和0V接口,先借个图,看起来清晰一点。
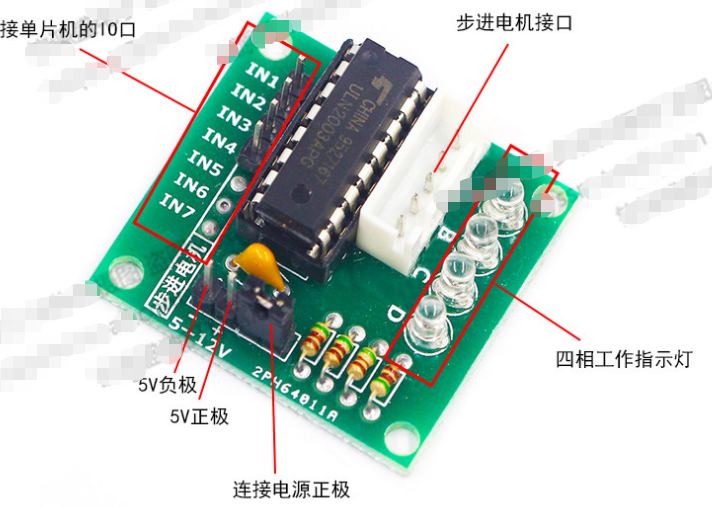
2. 步进电机及ULN2003控制模块
步进电机利用4步或8步脉冲信号来驱动电机转动,这里用双4步(ab bc cd da)来控制电机,可以获得比较强的扭矩,同时精度也比单4步要好,这个ULN2003控制模块有个缺点,就是控制间隔不能小于3ms,否则电机只震动,不转动。

连接也很简单,正负极接到zero上,控制脚使用BCM编号为23 24 25 12的针脚,BCM编号见第一张图。
3. 兼容的USB摄像头
直接扔到usb集线器上就完事了,树莓派上使用lsusb查看,如果没有,基本是不兼容导致的。

4. 兼容树莓派的USB无线网卡

5. USB集线器

软件部分
软件也是主要三大块:
1. 继电器控制、定时控制、步进电机控制 (代码文件保存到/home/pi/scripts/MyTcpControl.py)
2. 摄像头实时视频流部署 (启动视频流服务的脚本保存到/home/pi/scripts/startCamera.sh)
3. 安卓远程控制APP>
1. 双路继电器控制、自动定时控制、步进电机控制
本模块使用Python语言编写。
- 建立TCP服务器,通信端口为7654
- 高低电平控制
由于使用的继电器写低为接通电路,所以代码中,使用GPIO.LOW来接通继电器电路,GPIO.HIGH来关闭继电器电路。 - 电机步进序列控制。
步进电机使用双4步来控制GPIO的电平信号,具体为:
1,1,0,0 0,1,1,0 0,0,1,1 1,0,0,1
MyTcpControl.py完整代码如下
import sys
import os
import _thread
import time
import datetime
from socket import *
import RPi.GPIO as GPIO
host = '0.0.0.0'
port = 7654
buffsize = 4096
ADDR = (host,port)
channel1 = 18
channel2 = 27
IN1 = 23
IN2 = 24
IN3 = 25
IN4 = 12
lightManual = False
pumpManual = False
lightStatus = 0
pumpStatus = 0
def main():
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(channel1,GPIO.OUT,initial=GPIO.HIGH)
GPIO.setup(channel2,GPIO.OUT,initial=GPIO.HIGH)
GPIO.setup(IN1,GPIO.OUT)
GPIO.setup(IN2,GPIO.OUT)
GPIO.setup(IN3,GPIO.OUT)
GPIO.setup(IN4,GPIO.OUT)
_thread.start_new_thread(autoControlLight, ("light",1))
_thread.start_new_thread(autoControlPump, ("pump",1))
server = socket(AF_INET,SOCK_STREAM)
server.bind(ADDR)
server.listen(10)
print("MyControl TcpServer is started")
while True:
try:
client,addr = server.accept()
_thread.start_new_thread(onAccept, (client,addr))
except:
print('Server is interrupted')
#server.close()
#server.shutdown()
def autoControlLight(tName,para):
global lightManual
global lightStatus
while True:
timeNow1 = datetime.datetime.now()
h = timeNow1.hour
m = timeNow1.minute
if h==0 and m==0:
lightManual = False
if h==8 and m==0 and lightManual==False:
GPIO.output(channel1,GPIO.LOW)
lightStatus = 1
if h==17 and m==0:
GPIO.output(channel1,GPIO.HIGH)
lightStatus = 0
time.sleep(60)
def autoControlPump(tName,para):
global pumpManual
global pumpStatus
while True:
timeNow2 = datetime.datetime.now()
h = timeNow2.hour
m = timeNow2.minute
if h==0 and m==0:
pumpManual = False
if h==8 and m==0 and pumpManual==False:
GPIO.output(channel2,GPIO.LOW)
pumpStatus = 1
if h==17 and m==0:
GPIO.output(channel2,GPIO.HIGH)
pumpStatus = 0
time.sleep(30)
def opDrive():
forwardDrive(0.008,512)
stopDrive()
def onAccept(sock, addr):
recvData = sock.recv(buffsize).decode('gbk')
print('recvData:'+recvData) #print data
retInfo=""
global lightManual
global lightStatus
global pumpManual
global pumpStatus
try:
if recvData=="open_close":
retInfo = "opDrive success"
sock.send(retInfo.encode('gbk'))
sock.close()
opDrive()
else:
if recvData=="open1":
GPIO.output(channel1,GPIO.LOW)
lightManual = True
lightStatus = 1
retInfo = "light 1"
elif recvData=="close1":
GPIO.output(channel1,GPIO.HIGH)
lightManual = True
lightStatus = 0
retInfo = "light 0"
elif recvData=="open2":
GPIO.output(channel2,GPIO.LOW)
pumpManual = True
pumpStatus = 1
retInfo = "pump 1"
elif recvData=="close2":
GPIO.output(channel2,GPIO.HIGH)
pumpManual = True
pumpStatus = 0
retInfo = "pump 0"
elif recvData=="reboot":
os.system("sudo reboot")
retInfo = "reboot success"
elif recvData=="getStatus":
retInfo=str(lightStatus)+","+str(pumpStatus)
elif recvData=="test":
retInfo="test ok"
sock.send(retInfo.encode('gbk'))
sock.close()
except Exception as err:
retInfo = str(err)
sock.send(retInfo.encode('gbk'))
sock.close()
def setStep(w1,w2,w3,w4):
GPIO.output(IN1,w1)
GPIO.output(IN2,w2)
GPIO.output(IN3,w3)
GPIO.output(IN4,w4)
def stopDrive():
setStep(0,0,0,0)
def forwardDrive(delay,steps):
for i in range(0,steps):
setStep(1,1,0,0)
time.sleep(delay)
setStep(0,1,1,0)
time.sleep(delay)
setStep(0,0,1,1)
time.sleep(delay)
setStep(1,0,0,1)
time.sleep(delay)
if __name__ == '__main__':
main()
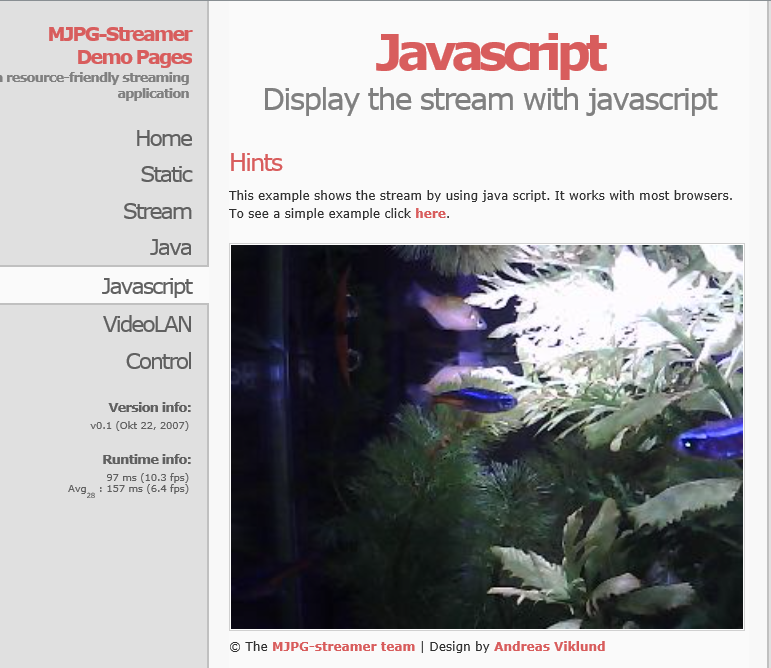
2. 摄像头实时视频流部署
尝试了motion组件,发现巨卡,转而使用mjpg-streamer,很流畅,推荐使用!
(1)安装依赖库
sudo apt-get install libjpeg62-dev sudo apt-get install libjpeg8-dev
(2)树莓派浏览器访问https://github.com/jacksonliam/mjpg-streamer 下载源码,默认到/home/pi/Downloads目录,完成后解压缩。
由于市面上大部分摄像头是YUYV格式输出,所以要修改mjpg-streamer项目的代码文件,让其默认支持此格式的摄像头。
使用nano指令,或TextEditor打开mjpg-streamer-experimental/plugins/input_uvc/input_uvc.c这个文件,找到input_init函数,修改
“format = V4L2_PIX_FMT_MJPEG” 为
“format = V4L2_PIX_FMT_YUYV”。
(3) 编译、部署mjpg-streamer项目
sudo apt-get install cmake cd /home/pi/Downloads/mjpg-streamer-master/mjpg-streamer-experimental sudo make clean all
编译完成后,复制相关文件到指定目录
sudo cp mjpg_streamer /usr/local/bin sudo cp output_http.so input_uvc.so /usr/local/lib/ sudo cp -R www /usr/local/www
最后,使用指令来启动视频组件
LD_LIBRARY_PATH=/usr/local/lib mjpg_streamer -i "input_uvc.so -r 320x240 -f 12" -o "output_http.so -p 12001 -w /usr/local/www"
在谷歌浏览器中,就可以看到视频了,预览地址为 http://树莓派IP:12001/?action=stream
3. 安卓远程控制APP
使用Android Studio作为IDE,利用webview控件作为人机交互,简单快速。
(1) fish.html文件,放入assets目录
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<link rel="shortcut icon" href="/favicon.ico" />
<link rel="bookmark" href="/favicon.ico" type="image/x-icon" />
<title>远程喂鱼</title>
<link rel="shortcut icon" href="favicon.ico">
<link href="css/bootstrap.min.css?v=3.3.6" rel="stylesheet">
<link href="css/font-awesome.css?v=4.4.0" rel="stylesheet">
<link href="css/animate.css" rel="stylesheet">
<link href="css/style.css?v=4.1.0" rel="stylesheet">
</head>
<body class="gray-bg">
<div class="wrapper wrapper-content" style="padding:10px;">
<div class="row">
<div class="col-sm-4">
<div class="ibox float-e-margins" style="margin-bottom:5px;">
<div class="ibox-content no-padding">
<div class="panel-body">
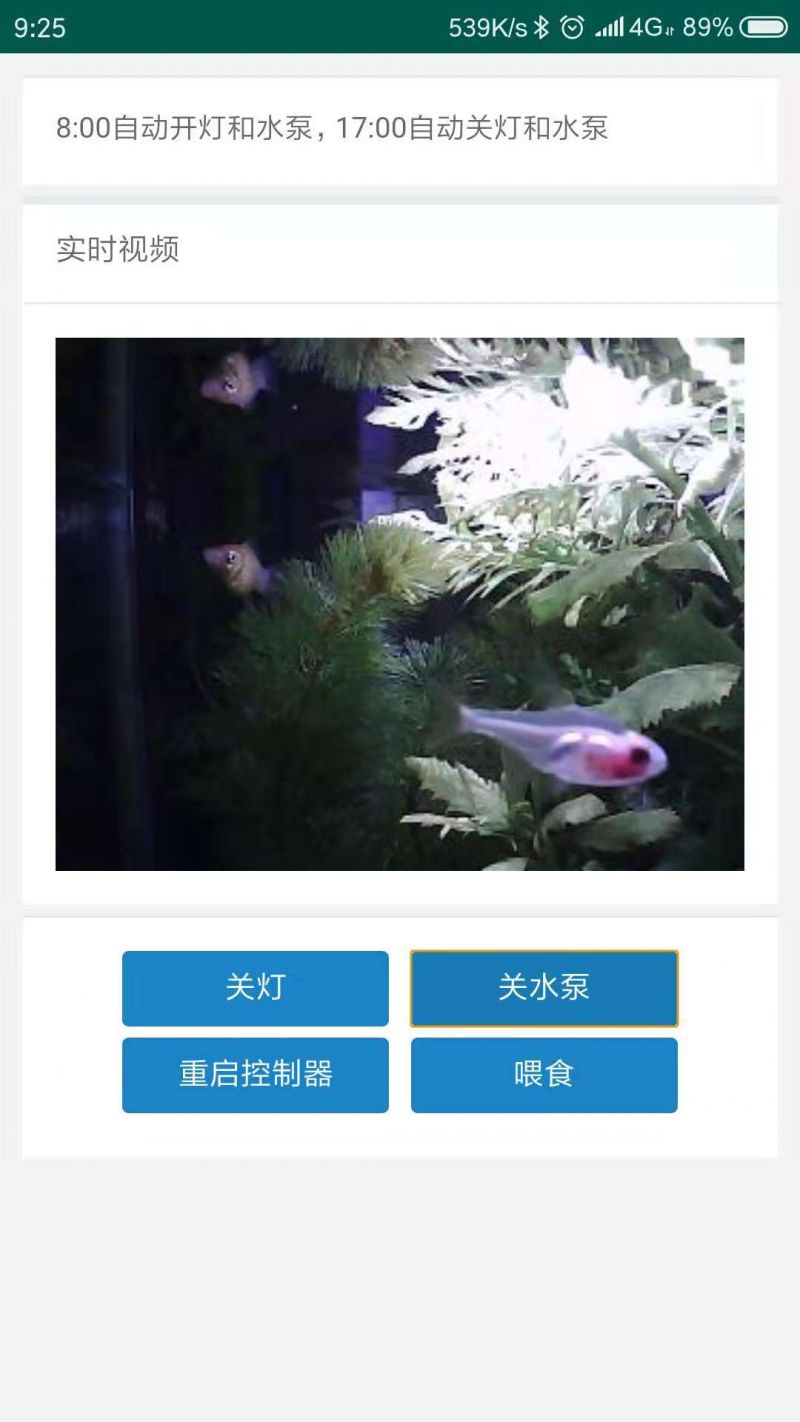
8:00自动开灯和水泵,17:00自动关灯和水泵
</div>
</div>
</div>
</div>
</div>
<div class="row">
<div class="col-sm-4">
<div class="ibox float-e-margins" style="margin-bottom:5px;">
<div class="ibox-title">
<h5>实时视频</h5>
</div>
<div class="ibox-content no-padding">
<div class="panel-body">
<img style="width:100%;height:240px;" src="http://树莓派IP:12001/?action=stream" />
</div>
</div>
</div>
</div>
</div>
<div class="row">
<div class="col-sm-4">
<div class="ibox float-e-margins" style="margin-bottom:5px;">
<div class="ibox-content no-padding">
<div class="panel-body" style="text-align:center;">
<button id="lightBtn" class="btn btn-w-m btn-success" type="button"></button>
<button id="pumpBtn" class="btn btn-w-m btn-success" type="button"></button>
<!--<button class="btn btn-w-m btn-success" type="button" onclick="control('resetvideo')">重启视频</button> -->
<button class="btn btn-w-m btn-success" type="button" onclick="control('reboot')">重启控制器</button>
<button id="fishBtn" class="btn btn-w-m btn-success" type="button" onclick="control('open_close')">喂食</button>
</div>
</div>
</div>
</div>
</div>
</div>
<script src="js/jquery.min.js?v=2.1.4"></script>
<script src="js/bootstrap.min.js?v=3.3.6"></script>
<script>
function control(op) {
if (op == "open_close")
$("#fishBtn").removeClass("btn-success").addClass("btn-default").attr('disabled', 'disabled');
var ret = "";
if (op == "resetvideo") {
if (confirm("确定要重启视频模块吗?")) {
ret = window.JSHook.execTcpCmd(op);
}
}
else if (op == "reboot") {
if (confirm("确定要重启控制器?")) {
ret = window.JSHook.execTcpCmd(op);
}
}
else
window.setTimeout(function () {
ret = window.JSHook.execTcpCmd(op);
controlCallback(op, ret);
}, 0);
}
function controlCallback(op, ret) {
if (op == "getStatus") {
var lightStatus = ret.split(",")[0];
var pumpStatus = ret.split(",")[1];
if (lightStatus == "1")
$("#lightBtn").removeClass("btn-default").addClass("btn-success").text("关灯").unbind("click").click(function () {
control("close1");
});
else
$("#lightBtn").removeClass("btn-success").addClass("btn-default").text("开灯").unbind("click").click(function () {
control("open1");
});
if (pumpStatus == "1")
$("#pumpBtn").removeClass("btn-default").addClass("btn-success").text("关水泵").unbind("click").click(function () {
control("close2");
});
else
$("#pumpBtn").removeClass("btn-success").addClass("btn-default").text("开水泵").unbind("click").click(function () {
control("open2");
});
}
else if (op == "open1" && ret == "light 1") { //开灯
$("#lightBtn").removeClass("btn-default").addClass("btn-success").text("关灯").unbind("click").click(function () {
control("close1");
});
}
else if (op == "close1" && ret == "light 0") {//关灯
$("#lightBtn").removeClass("btn-success").addClass("btn-default").text("开灯").unbind("click").click(function () {
control("open1");
});
}
else if (op == "open2" && ret == "pump 1") {//开水泵
$("#pumpBtn").removeClass("btn-default").addClass("btn-success").text("关水泵").unbind("click").click(function () {
control("close2");
});
}
else if (op == "close2" && ret == "pump 0") {//关水泵
$("#pumpBtn").removeClass("btn-success").addClass("btn-default").text("开水泵").unbind("click").click(function () {
control("open2");
});
}
else if (op == "open_close" && ret == "opDrive success") {
alert("喂食成功");
$("#fishBtn").removeClass("btn-default").addClass("btn-success").removeAttr("disabled");
}
}
control("getStatus");
</script>
</body>
</html>
(2)Activity里就一个WebView组件,主窗体后端代码MainActivity.java
package com.wszhoho.viewfish;
import android.annotation.SuppressLint;
import android.os.Bundle;
import android.os.Vibrator;
import android.support.v7.app.AppCompatActivity;
import android.view.View;
import android.view.WindowManager;
import android.webkit.JavascriptInterface;
import android.webkit.WebChromeClient;
import android.webkit.WebSettings;
import android.webkit.WebView;
import java.lang.ref.WeakReference;
import java.util.Random;
public class MainActivity extends AppCompatActivity {
static WeakReference<WebView> _webView;
Vibrator vibrator;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
vibrator = (Vibrator) getSystemService(VIBRATOR_SERVICE);
Random rnd = new Random(100);
int v = rnd.nextInt();
String webViewUrl = "file:///android_asset/fish.html?v=" + v;
initWebView(webViewUrl);
getWindow().addFlags(WindowManager.LayoutParams.FLAG_KEEP_SCREEN_ON);
}
@SuppressLint("SetJavaScriptEnabled")
private void initWebView(String url) {
_webView = new WeakReference<>(findViewById(R.id.webView));
//重新设置WebSettings
WebSettings webSettings = _webView.get().getSettings();
webSettings.setDisplayZoomControls(false);
webSettings.setSupportZoom(false);
webSettings.setAppCacheEnabled(true);
webSettings.setAllowFileAccess(true);
webSettings.setUseWideViewPort(true);
webSettings.setLoadWithOverviewMode(true);
webSettings.setSaveFormData(false);
webSettings.setDomStorageEnabled(true);
webSettings.setSupportMultipleWindows(true);
webSettings.setJavaScriptCanOpenWindowsAutomatically(true);
webSettings.setJavaScriptEnabled(true);
_webView.get().addJavascriptInterface(this, "JSHook");
_webView.get().setScrollBarStyle(View.SCROLLBARS_INSIDE_OVERLAY);
_webView.get().canGoBack();
_webView.get().requestFocus();
_webView.get().setWebChromeClient(new WebChromeClient());
_webView.get().loadUrl(url);
}
@JavascriptInterface
public String execTcpCmd(String op) {
try {
if (!op.equals("getStatus"))
vibrator.vibrate(100);
String ret = TcpClient.SendMsg(op);
return ret;
} catch (Exception ignored) {
return "-1";
}
}
}
(3)TcpClient.java
package com.wszhoho.viewfish;
import java.io.BufferedReader;
import java.io.IOException;
import java.io.InputStreamReader;
import java.io.OutputStream;
import java.net.Socket;
import java.util.concurrent.atomic.AtomicReference;
import java.util.concurrent.locks.ReentrantLock;
class TcpClient {
private static ReentrantLock lock = new ReentrantLock();
static String SendMsg(String msg) {
lock.lock();
AtomicReference<String> retStr = new AtomicReference<>("");
new Thread(() -> {
Socket client = null;
try {
client = new Socket(树莓派IP, 7654);
BufferedReader in = new BufferedReader(new InputStreamReader(client.getInputStream()));
OutputStream os = client.getOutputStream();
os.write(msg.getBytes("utf-8"));
os.flush();
retStr.set(in.readLine());
} catch (IOException e) {
e.printStackTrace();
} finally {
if (client != null) {
try {
client.close();
} catch (IOException e) {
e.printStackTrace();
}
}
}
}).start();
while (retStr.get().equals("")) {
try {
Thread.sleep(20);
} catch (InterruptedException e) {
e.printStackTrace();
}
}
lock.unlock();
return retStr.get();
}
}
(4)AndroidManifest.xml权限配置
<uses-permission android:name="android.permission.INTERNET" /> <uses-permission android:name="android.permission.WRITE_EXTERNAL_STORAGE" /> <uses-permission android:name="android.permission.VIBRATE" />
自启动配置
首先更改系统默认的python运行版本:
sudo rm /usr/bin/python sudo ln -s /usr/bin/python3 /usr/bin/python
进入/home/pi/.config目录,建立autostart文件夹,进入该文件夹,建立两个后缀名为”.desktop”的文件。
camera.desktop文件,内容为:
[Desktop Entry] Type=Application Exec=/home/pi/scripts/startCamera.sh
tcpserver.desktop文件,内容为:
[Desktop Entry] Type=Application Exec=python /home/pi/scripts/MyTcpControl.py
完成后,重启树莓派,所有配置全部完成。
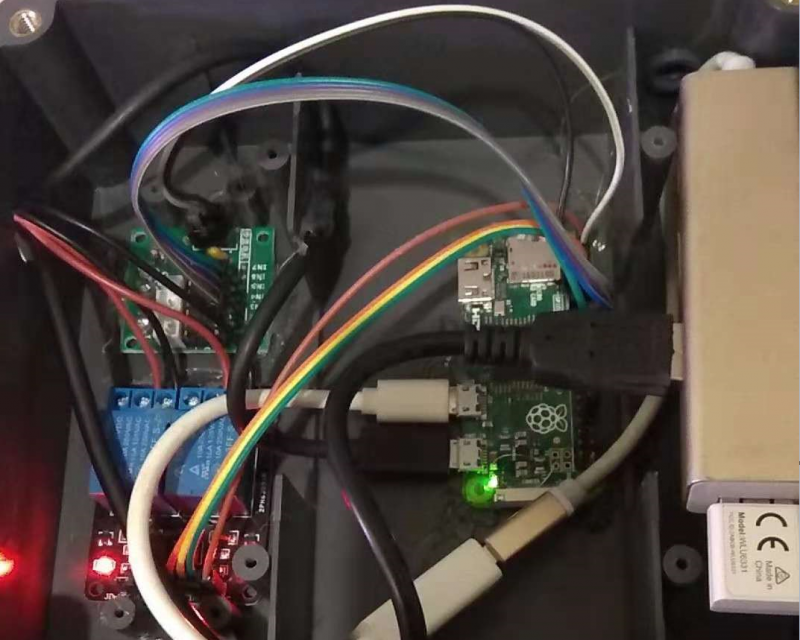
最终完成情况:
盒子巨丑,好在空间大,够放!
安卓APP,我家宝宝选的图标,巨喜欢 :-)

我就想问 不换水么?
鱼缸不用老换水,有过滤系统
请问你视频是如何推流跟收流的
厉害
楼主代码能否没注译,并给出原理框架?
zero,自己就带无线网卡了,还要USB网卡做什么?
请问会不会出现socket连接不上或者手机上的喂食按钮不管用的情况呀
为什么我的内网穿透后帧率只有1-2fps