
Raspberry Pi OS Bullseye 版本发布时弃用的 Picamera 以新面貌回归了,那就是 Picamera2 库。
下面介绍使用树莓派摄像头模块,用 Picamera2 库和 TensorFlow Lite 实现实时对象检测。
安装 Picamera2 库
因为目前 Picamera2 库还处于预览版,因此暂时只能通过 GitHub 编译安装。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 | $ sudo apt update$ sudo apt install -y libboost-dev$ sudo apt install -y libgnutls28-dev openssl libtiff5-dev$ sudo apt install -y qtbase5-dev libqt5core5a libqt5gui5 libqt5widgets5$ sudo apt install -y meson$ sudo pip3 install pyyaml ply$ sudo pip3 install --upgrade meson$ sudo apt install -y libglib2.0-dev libgstreamer-plugins-base1.0-dev$ git clone --branch picamera2 https://github.com/raspberrypi/libcamera.git$ cd libcamera$ meson build --buildtype=release -Dpipelines=raspberrypi -Dipas=raspberrypi -Dv4l2=true -Dgstreamer=enabled -Dtest=false -Dlc-compliance=disabled -Dcam=disabled -Dqcam=enabled -Ddocumentation=disabled -Dpycamera=enabled$ ninja -C build$ sudo ninja -C build install$ cd ~$ git clone https://github.com/tomba/kmsxx.git$ cd kmsxx$ git submodule update --init$ sudo apt install -y libfmt-dev libdrm-dev$ meson build$ ninja -C build$ cd ~$ sudo pip3 install pyopengl$ sudo apt install python3-pyqt5$ git clone https://git@github.com:raspberrypi/picamera2.git$ sudo pip3 install opencv-python==4.4.0.46$ sudo apt install -y libatlas-base-dev$ sudo pip3 install numpy --upgrade$ cd ~$ git clone https://github.com/RaspberryPiFoundation/python-v4l2.git |
要跑起来还需要设置 PYTHONPATH 运行环境。比如你需要将下面的内容添加到 .bashrc 文件中。
1 | export PYTHONPATH=/home/pi/picamera2:/home/pi/libcamera/build/src/py:/home/pi/kmsxx/build/py:/home/pi/python-v4l2 |
安装 TensorFlow Lite
由于我们将通过 Python 代码进行推理而不是训练,因此我们可以安装轻量级 TensorFlow Lite 运行时库以及我们需要的其他一些东西:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | $ sudo apt install build-essentials$ sudo apt install git$ sudo apt install libatlas-base-dev$ sudo apt install python3-pip$ pip3 install tflite-runtime$ pip3 install opencv-python==4.4.0.46$ pip3 install pillow$ pip3 install numpy |
开始使用 TensorFlow Lite
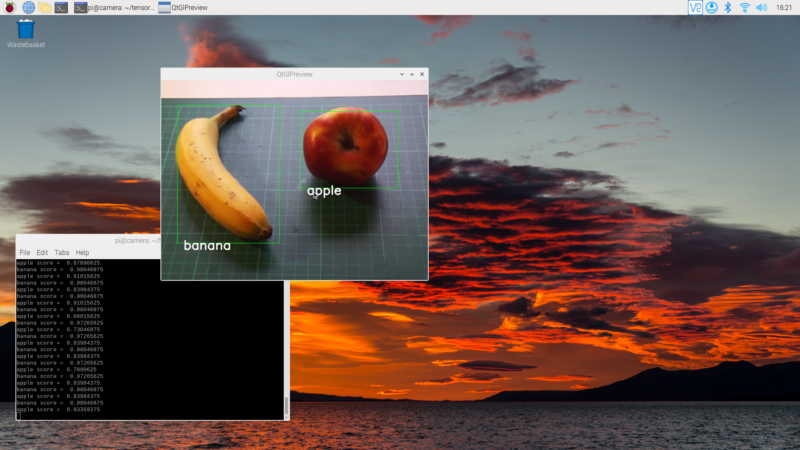
安装完所有东西之后,下面我们构建一个演示程序:寻找图像中的苹果和香蕉。
视频播放器
00:00
00:00
代码会启用摄像头,并将采集到的图像不断传给 TensorFlow 的图像缓冲区。TensorFlow 随之在图像上进行对象检测。如果检测到任何对象,将用矩形框进行标注。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 | import tflite_runtime.interpreter as tfliteimport sysimport osimport argparseimport cv2import numpy as npfrom PIL import Imagefrom PIL import ImageFont, ImageDrawfrom qt_gl_preview import *from picamera2 import *normalSize = (640, 480)lowresSize = (320, 240)rectangles = []def ReadLabelFile(file_path): with open(file_path, 'r') as f: lines = f.readlines() ret = {} for line in lines: pair = line.strip().split(maxsplit=1) ret[int(pair[0])] = pair[1].strip() return retdef DrawRectangles(request): stream = request.picam2.stream_map["main"] fb = request.request.buffers[stream] with fb.mmap(0) as b: im = np.array(b, copy=False, dtype=np.uint8).reshape((normalSize[1],normalSize[0], 4)) for rect in rectangles: print(rect) rect_start = (int(rect[0]*2) - 5, int(rect[1]*2) - 5) rect_end = (int(rect[2]*2) + 5, int(rect[3]*2) + 5) cv2.rectangle(im, rect_start, rect_end, (0,255,0,0)) if len(rect) == 5: text = rect[4] font = cv2.FONT_HERSHEY_SIMPLEX cv2.putText(im, text, (int(rect[0]*2) + 10, int(rect[1]*2) + 10), font, 1, (255,255,255),2,cv2.LINE_AA) del imdef InferenceTensorFlow( image, model, output, label=None): global rectangles if label: labels = ReadLabelFile(label) else: labels = None interpreter = tflite.Interpreter(model_path=model, num_threads=4) interpreter.allocate_tensors() input_details = interpreter.get_input_details() output_details = interpreter.get_output_details() height = input_details[0]['shape'][1] width = input_details[0]['shape'][2] floating_model = False if input_details[0]['dtype'] == np.float32: floating_model = True rgb = cv2.cvtColor(image,cv2.COLOR_GRAY2RGB) initial_h, initial_w, channels = rgb.shape picture = cv2.resize(rgb, (width, height)) input_data = np.expand_dims(picture, axis=0) if floating_model: input_data = (np.float32(input_data) - 127.5) / 127.5 interpreter.set_tensor(input_details[0]['index'], input_data) interpreter.invoke() detected_boxes = interpreter.get_tensor(output_details[0]['index']) detected_classes = interpreter.get_tensor(output_details[1]['index']) detected_scores = interpreter.get_tensor(output_details[2]['index']) num_boxes = interpreter.get_tensor(output_details[3]['index']) rectangles = [] for i in range(int(num_boxes)): top, left, bottom, right = detected_boxes[0][i] classId = int(detected_classes[0][i]) score = detected_scores[0][i] if score > 0.5: xmin = left * initial_w ymin = bottom * initial_h xmax = right * initial_w ymax = top * initial_h box = [xmin, ymin, xmax, ymax] rectangles.append(box) if labels: print(labels[classId], 'score = ', score) rectangles[-1].append(labels[classId]) else: print ('score = ', score)def main(): parser = argparse.ArgumentParser() parser.add_argument('--model', help='Path of the detection model.', required=True) parser.add_argument('--label', help='Path of the labels file.') parser.add_argument('--output', help='File path of the output image.') args = parser.parse_args() if ( args.output): output_file = args.output else: output_file = 'out.jpg' if ( args.label ): label_file = args.label else: label_file = None picam2 = Picamera2() preview = QtGlPreview(picam2) config = picam2.preview_configuration(main={"size": normalSize}, lores={"size": lowresSize, "format": "YUV420"}) picam2.configure(config) stride = picam2.stream_configuration("lores")["stride"] picam2.request_callback = DrawRectangles picam2.start() while True: buffer = picam2.capture_buffer("lores") grey = buffer[:stride*lowresSize[1]].reshape((lowresSize[1], stride)) result = InferenceTensorFlow( grey, args.model, output_file, label_file )if __name__ == '__main__': main() |
请问tflite和label文件怎么下载