

MAKER: Shebin Jose Jacob, Nekhil/译:趣无尽(转载请注明出处)
简介
Emo 是一款个人伴侣机器人,集时尚与创新于一身。他的诞生离不开最新的树莓派 4 技术和先进的设计。他不仅仅是一款机器人,更是一个活生生的存在。与其他机器人不同,他拥有独特的个性和情感,能够俘获你的心灵。
硬件部分
– 树莓派 4B
– 微雪 2 英寸 IPS LCD 显示屏(240×320 分辨率)
– SG90 型舵机 ×2
– MG90 型舵机
– 16 路 12 位 PWM 舵机驱动板
– 801S 震动传感器模块
– 单路 TTP223 触摸传感器模块
– 8 Ω 0.5 W 扬声器模块
– PAM8403 双声道立体声音频放大器模块
– 5 x 7cm 双面通用 PCB 原型板
– 40 针 2.54mm 直插式排针排母连接器(分离式针座)
– 304 不锈钢 CSK 沉头十字螺栓 M2 ×10
– M3 x 10mm CHHD 螺栓螺母套件
– M3 x 20mm CHHD 螺栓螺母套件
– B-30-1000 电路板飞线(有 PVC 绝缘外层)
– 2mm 厚亚克力板
软件部分
– Autodesk Fusion 360
– Microsoft VS Code
工具部分
– 多功能螺丝刀
– 电烙铁
– 无铅焊锡丝
– 电路板焊接固定夹具
– 助焊剂
– 多功能剥线钳
– 热胶枪
设计理念
我们使用 Autodesk Fusion 360 来设计 Emo 机器人,其中融合了实体和自由形式的建模技术。


为了简化打印过程,我们将机器人的主体分成几个部分,方便用螺钉组装。

我们精心考虑了电源的位置,将它置于底座上,并为电源线的自由移动预留了充足的空间。为了提高机器人运动的稳定性,我们还特意使车身与底座轻微接触。
另外,我们特意选择蓝白配色方案,因为蓝白组合能提升机器人的视觉吸引力。
3D 打印
我们选择 PLA 作为 3D 打印材料,并单独打印每个组件,但这需要花费较长时间。

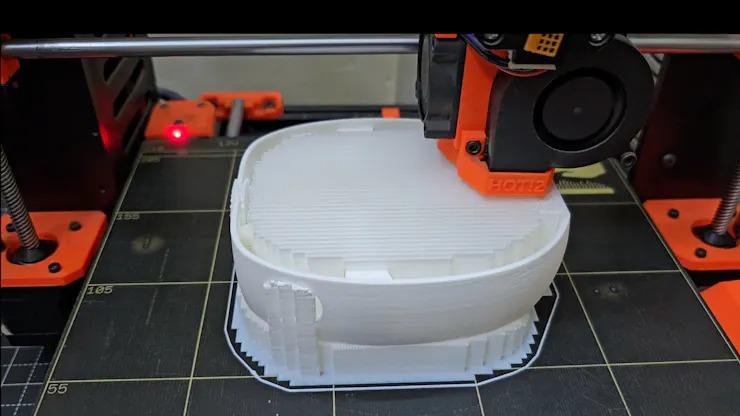

为了提升底座的耐用性,我们将底座的填充密度设置为 40%,而其他部分则为 20% 。

现在我们已经打印完所有零件,下面请跟着我的步伐开始组装吧!
注:3D 图纸及代码见项目文件库:
https://make.quwj.com/project/464
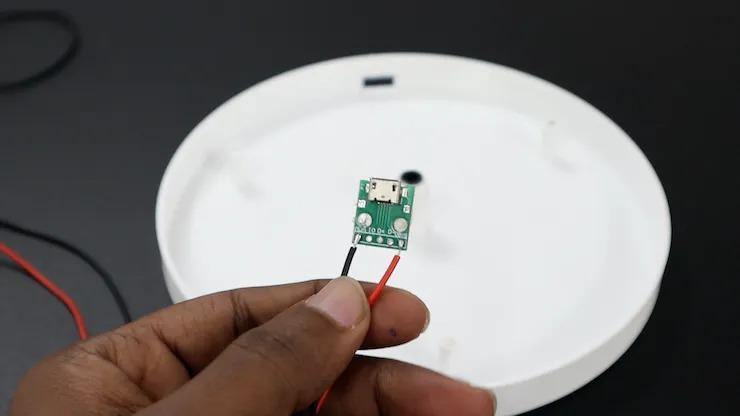
组装底座
首先,我们将 Micro USB 模块安装在底座上,这将作为机器人的供电接口。
我们将 SW-420 震动传感器放在靠近 USB 模块的位置上,它可以侦测到机器人周围产生的任何振动。
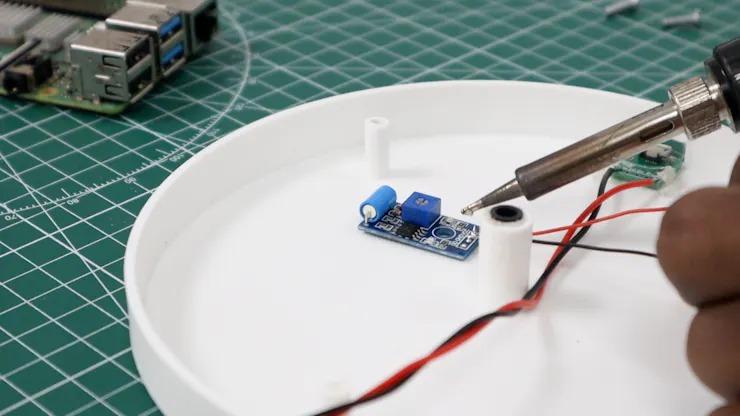
底座部分由以下三根导线组成:VCC、GND 和震动传感器的输出导线。
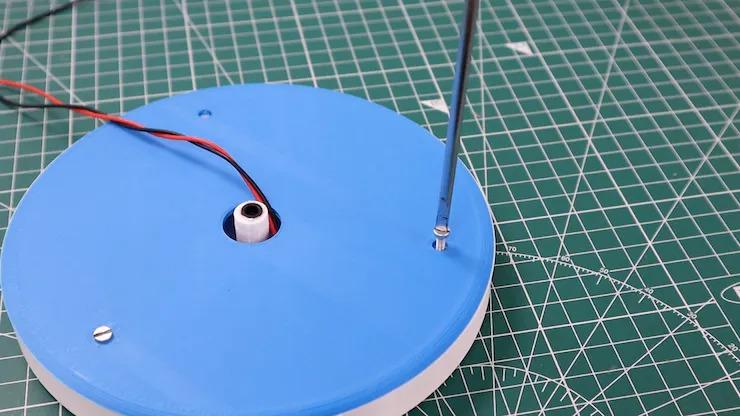
最后,我们使用 M3 x 10 mm 螺栓将盖子牢牢地固定在底座上。至此我们完成了底座部分的组装。
组装头部
为了让机器人头部具有触控能力,我们采用了一款紧凑型电容式触摸传感器,并将其完美地嵌入到指定区域中。

机器人头部的核心部分是一块微雪的 2 英寸 IPS 显示屏,它承担着传达机器人情感的重要任务。我们使用黑色支架和少量热熔胶将这块显示屏牢牢地固定住。

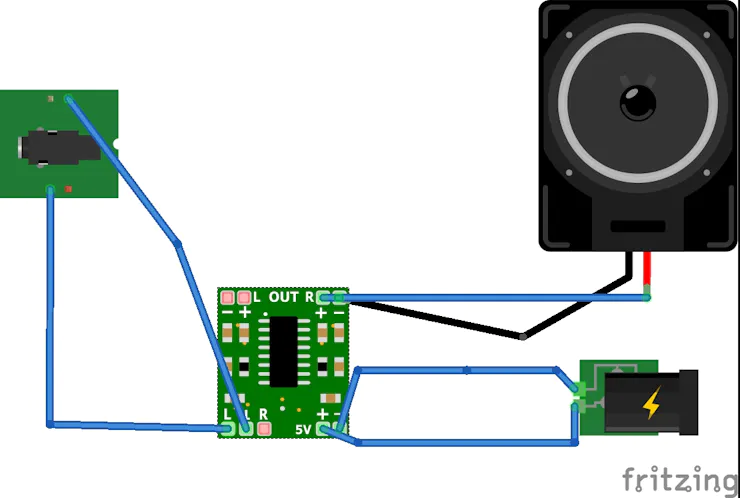
为了实现音频播放功能,我们机器人在头部左侧集成一枚 8 Ω 0.5 W 扬声器,并搭配 PAM8403 放大器,对树莓派中的声音进行放大。


接着,我们使用 M3 x 15 mm 螺钉将头部下半部分牢牢地固定在机器人的身体上。然后连接之前组装好的头部上半部分,最终完成整个头部的组装。

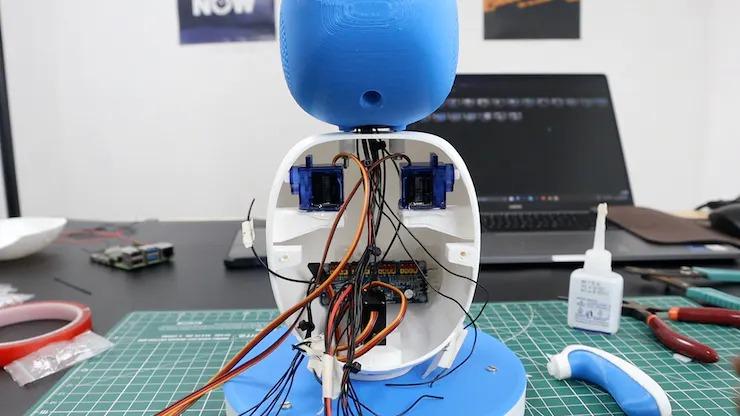
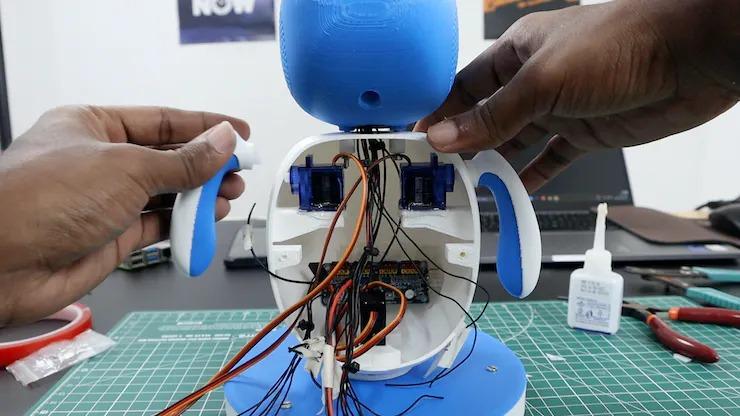
组装身体
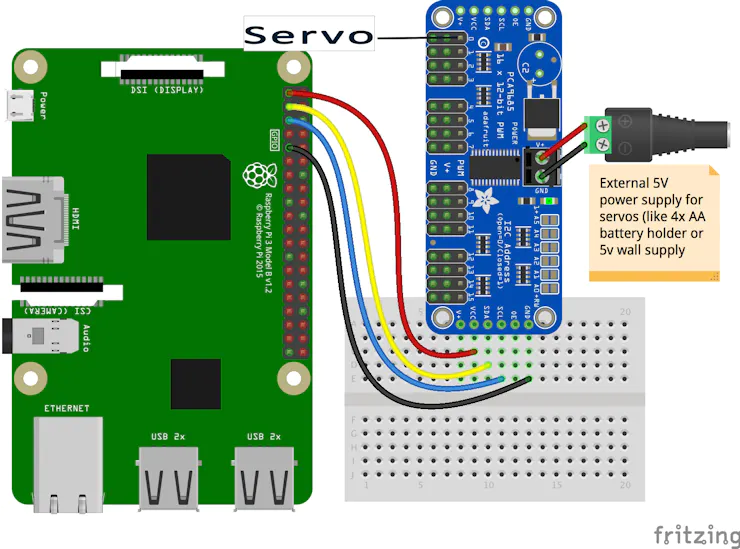
在机身部分,我们安装了三个舵机:两个用于手部的 SG90 型舵机,以及一个用于身体旋转的 MG90 型舵机。为了方便地控制这些舵机,我们采用了 PCA9685-16 通道舵机驱动器。
为了确保稳定性,我们还使用 M2 号螺母和螺栓将 MG90 型舵机固定在机身前部。

我们把 PCA9685 模块放在同一区域,这样能有效地平衡重力。

现在我们开始组装机器人手部。只需把 SG90 型舵机安装到两端,并把它牢牢地固定在舵轴上,就完成了。
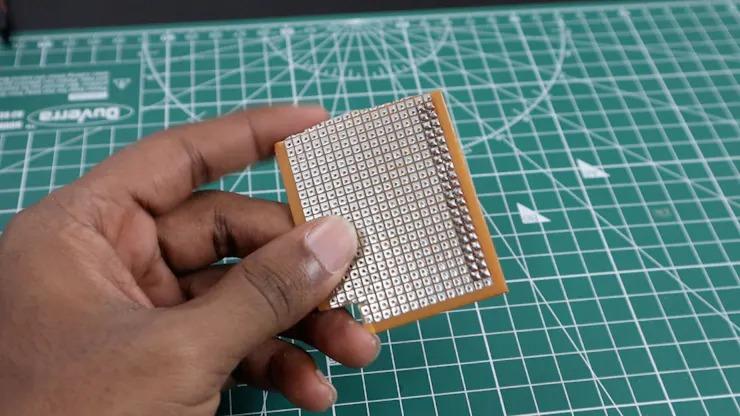
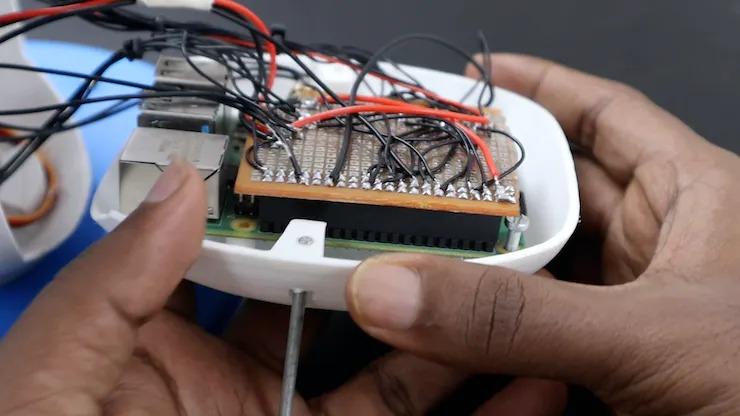
我们采用带有排母的原型板来连接树莓派,这种方法比使用导线连接更为高效。同时,通过焊接,我们能保证各个元件正确连接,从而最大程度地降低导线缠绕的可能。
为节约空间,我们使用手机充电器上的公头 USB Type-C 板为树莓派供电。音频传输方面,我们采用了 TRS 音频插孔。
最后,我们用螺栓把树莓派固定在机身背部,至此完成了电源部分的安装。


此外,我们在正面采用了 2 mm 厚透明亚克力板,这可以掩盖住外盖和 LCD 模块之间的缝隙。

电路部分
如下图接线:


编程
接着,我们开始编写生成情感的代码,其中舵机运动和动画是核心部分。为了实现这些复杂的功能,我们采用 Python 的 `multiprocessing` 包,这使机器人能够同时执行多个任务,从而提高运行效率。
我们已经为你编写好项目代码,你只需克隆到本地即可使用。
1 | git clone https://github.com/CodersCafeTech/Emo.git |
值得一提的是,我们使用 Adobe After Effects 软件制作动画,并将其导出为图像序列,这使得它更易于集成到整个系统中。
调试
完成编程后,为确保机器人正常运行,我们需要对所有组件进行测试。
首先安装所需依赖:
1 | pip install adafruit-blinka adafruit-circuitpython-servokit |
进入代码文件夹(Code),并执行以下命令启动程序:
1 | python3 final.py |
现在你的 Emo 机器人已经开始运行了!当你对他说一些话时,他会分析您的语气并在屏幕上显示相应的表情。

成果
见证奇迹的时刻到了!





这样排布空间散热可以吗,不会太热嘛